





Уже в ближайшее время социальные роботы и роботы-помощники станут важной частью жизни людей. Они могут оказаться у вас дома, в больницах и в школах, они будут помогать с заботой о детях, о престарелых, будут ассистировать при реабилитации после болезни или травмы, а также в реализации любой другой формы помощи.
Каким должен быть робот?

Но как много человечество знает о психологии взаимодействия с роботами? Как должен выглядеть подобный робот? Как он должен передвигаться и реагировать на людей? На какую информацию он должен реагировать? Должен ли робот «проявлять» эмоции и отвечать на проявление эмоций человека? Насколько похожим на человека должен быть такой робот? Насколько инновационными могут быть научные идеи при разработке подобных роботов, способных быть отзывчивыми помощниками и оказывать необходимую и надежную поддержку, включая моменты особого стресса и напряжения, в которых может оказаться человек?
Научные исследования



Пришло время взглянуть на два отдельных научных исследования, которые рассматривают то, как люди понимают эмоции у роботов и реагируют на них. В каждом наборе экспериментов очень детально изучались некоторые конкретные аспекты того, как роботы могут выглядеть или двигаться. Междисциплинарная международная команда ученых из Израиля и США занялась первым исследованием, второе же исследование было проведено в Америке при содействии экспертов из сфер роботехники, виртуальной реальности, человеческого фактора и человека как такового. Робот по имени Трэвис не выглядит как человек. Трэвис имеет небольшой размер, черты, отдаленно напоминающие какое-либо существо, большие уши, но при этом у него нет ни глаз, ни носа, ни рта. Его высота составляет около 28 сантиметров, и, когда вы ставите его на стол, голова Трэвиса оказывается примерно на уровне с лицом сидящего перед столом человека. Робот может кивать, раскачиваться или отворачиваться. У Трэвиса имеется часть, которую можно трактовать как вытянутую ногу, а также у него имеется вытянутая рука, в которой он держит смартфон, благодаря которому он работает.
Первый эксперимент

Когда участники (102 студента) прибыли в лабораторию, им было сказано, что они принимают участие в тестировании нового алгоритма понимания речи для роботов, и в рамках этого тестирования робот будет пытаться понять, что человек ему говорит. Участников попросили рассказать роботу о проблеме, заботе или стрессовой ситуации, с которой они столкнулись в недавнее время, например, о недавней ссоре с другом или членом семьи или о серьезной болезни. Их попросили также описать их проблему в трех частях, а также говорить, когда они заканчивают рассказывать каждую часть, после чего робот будет отвечать им с помощью смартфона. Однако участники не знали, что их случайным образом разделили на две группы. В «реагирующей» группе Трэвис находился лицом к участнику, когда тот рассказывал о своей проблеме, периодически слегка кивая головой и покачиваясь. Также в конце каждой из трех частей на экране смартфона демонстрировалось сообщение из готового набора, такое как «Я понимаю, через что ты проходишь» или «Тебе, наверное, пришлось нелегко». В действительности Трэвис даже не выбирал эти сообщения. Один из ученых слушал беседу и выбирал подходящее сообщение в нужное время.



Вторая группа
Участники «нереагирующей» группы столкнулись с совершенно другим Трэвисом. Он не кивал и не качался, а текст, который отображался на экране смартфона после завершения каждой из частей рассказа, просто сообщал участнику, чтобы он продолжал говорить. После завершения «беседы» участников попросили оценить робота по ряду критериев в форме ответов на несколько простых вопросов о том, насколько отзывчивым был Трэвис. Например, их просили по шкале от одного до десяти оценить, насколько они согласны с фразами «Робот понимал, что я думаю и чувствую» или «Робот действительно меня слышал». Другие вопросы также уточняли, насколько общительным и компетентным был Трэвис.
Каков же результат?

Также видеозаписи общения каждого из участников с Трэвисом были оценены независимыми судьями, которые не знали о том, в каких условиях находится каждый участник. Анализ беседы показал, что участники, которые общались с отзывчивым роботом, не рассказали больше о сути своей проблемы, чем участники, которые общались с неотзывчивым роботом. Однако отзывчивый Трэвис получил гораздо более высокую оценку по шкале общительности и компетентности (его описывали как способного, надежного и знающего). Что еще важнее, когда независимые судьи просматривали и оценивали видеозаписи, они заметили, что те участники, которые общались с отзывчивым Трэвисом, сами были гораздо более отзывчивыми по отношению к роботу и шли на открытый разговор. Они чаще наклонялись вперед к Трэвису, улыбались, поддерживали с ним зрительный контакт. Точно то же самое было обнаружено и в последующем исследовании, в рамках которого участников просили рассказать не отрицательное, а положительное событие в их жизни.



Выводы
Таким образом, даже когда робот не напоминает человека, люди быстро ухватывают даже самые слабые сигналы отзывчивости на их собственные слова и действия. Соответственно, дизайн робота не должен иметь большое количество различных деталей, жестов и вариантов действий, чтобы повысить человеческую оценку его отзывчивости и социальности. В результате можно сказать, что это открывает гораздо больше возможностей для того, чтобы разрабатывать функциональных роботов. Но что если человеку приходится столкнуться с роботом непосредственно тогда, когда он находится в состоянии стресса? Не когда он просто вспоминает что-то плохое, а переживает реальный физический и когнитивный стресс. Сможет ли стресс помешать человеку «прочитать» невербальную эмоциональную экспрессию робота?
Что насчет «чтения» эмоций в состоянии стресса?
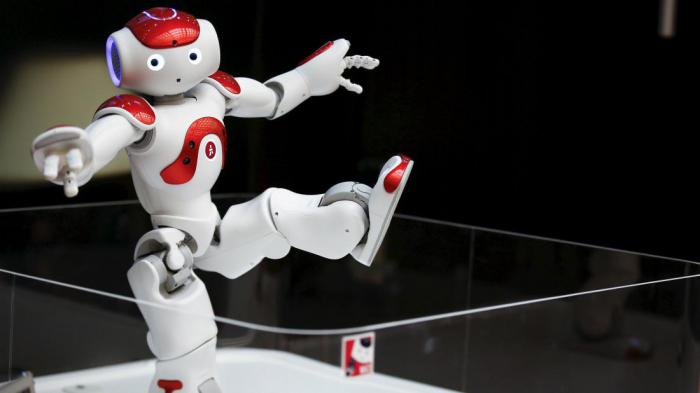
И хотя исследования продемонстрировали, что люди способны читать эмоциональные выражения у роботов в повседневных нейтральных условиях, второе исследование, о котором пойдет речь, стало первым в истории, изучившим реакцию человека на робота непосредственно во время сильного стресса. В рамках исследования были симулированы стрессовые условия. Ученые заставляли участников погружать руку в ледяную воду на определенные промежутки времени, при этом подвергая их еще большему стрессу, заставляя решать сложные математические задания в уме. После этого их просили оценить эмоционально-экспрессивные или статически позы 60-сантиметрового робота-гуманоида Нао. Выражение лица и глаз Нао оставались неизменными, в то время как тело робота занимало одну из 25 различных поз, которые демонстрировали либо положительные, либо отрицательные эмоции.
Результаты второго исследования
Повлиял ли стресс на то, как участники могли «читать» позы робота? Второй группе участников повезло больше, они погружали руку в теплую воду и в уме выполняли простейшие арифметические примеры. Однако оказалось, что стресс оказывает крайне малое влияние на то, как люди воспринимают эмоции, за исключением тех поз, которые демонстрировали сильное оживление или возбуждение. Когда участники сами были подвержены стрессу, они воспринимали негативные позы робота как более негативные и менее оживленные или возбужденные. Другими словами, стресс немного сместил восприятие эмоций робота, поэтому негатив казался еще большим негативом, а позитив – меньшим позитивом.








