Вакуумные системы перемещения широко используются в разных отраслях промышленности и строительства. С помощью таких устройств надежно и безопасно выполняются типовые манипуляции с разнообразными материалами в рамках логистических и производственных процессов. Для быстрого и частого высотного перемещения используют вакуумный подъемник, который может иметь различные рабочие характеристики и конструкционное исполнение.
Общий принцип работы подъемника
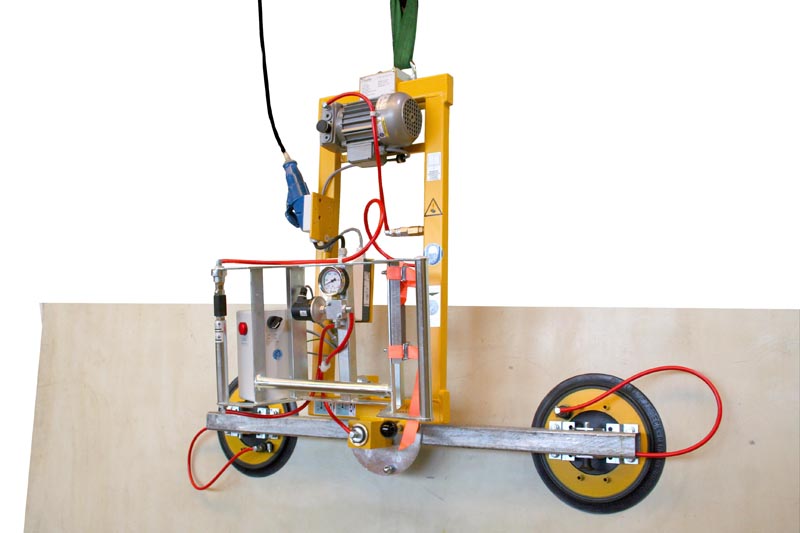
Устройство содержит в конструкции специальные вакуумные присоски, за счет которых обеспечивается захват целевого материала. Далее производится перемещение удерживаемого объекта по заданному контуру движения. Принцип вакуумного захвата обеспечивается усилием специального насоса с генератором, обеспечивающим вакуумирование присоски. Грубо говоря, под действием пневматического сжатия происходит плотное соединение поверхности присоски и целевого материала с определенной нагрузкой, достаточной для выполнения последующих манипуляций без разрыва. Некоторые модификации предусматривают наличие крюка в системе механического захвата, который также позволяет осуществлять параллельный зацеп канистр, ведер, ящиков и других объектов, имеющих точку подвеса.
Виды механизмов вакуумного захвата

Поскольку условия выполнения операций захвата и перемещения могут быть разными, отличаются и конструкции рабочих механизмов. Речь идет об основе вакуумного захвата, которая непосредственно контактирует с поверхностью объекта. Выделяют следующие его разновидности:
- Одинарный захват – простейшее малогабаритное решение, которое оптимально подходит для обслуживания коробок, корпусных изделий, плит и т. д.
- Круглый захват – специальный механизм для работы с шероховатыми материалами. Например, такими головками снабжаются вакуумные подъемники для металла, каменных плит и деревянных изделий, прошедших грубую абразивную обработку.
- Двойной захват – система, которая применяется в работе с объектами, требующими удержания в нескольких точках. В частности, если планируется перемещать на весу склеенные, связанные или ненадежно стыкующиеся другим способом коробки.
- Многофункциональный захват – наиболее сложная конструкция механизма удержания, в которой предполагается одновременная работа четырех и более головок фиксации. Это лучший вакуумный подъемник для стекла и других хрупких материалов, которые представлены в формате больших панелей. В данном случае требуется удержание в нескольких точках нагрузки, что позволяет исключать риски разлома и повреждения изделий под собственным весом.
Крановые механизмы в системе подъемника

Захват целевого объекта – лишь полдела. Далее требуется его непосредственное перемещение, за что и отвечает кран-манипулятор. Его конструкция обычно выполняется из стальных или алюминиевых (анодированный сплав) балок и профилей, которые проектируются под конкретные условия применения. Основу крана составляет несущая или подвесная база. В первом случае это напольная вертикальная колонна, которую надежно фиксируют и при необходимости страхуют усиливающими элементами. В случае с навесной системой реализуется конструкция рельсового потолочного манипулятора. Вакуумный подъемник перемещается по заданным маршрутам в рамках рабочей зоны на жестких подвесных креплениях, например, в виде цепной тали. Усилие для движения такой транспортной тележки создает блок питания с собственной энергетической подводкой.
Устройство коммуникационного шланга
Генератор, кран и вакуумные захваты связывает между собой подъемный элемент. Он непосредственно соединяет передвижную таль и устройства с присосками. Подъемный элемент выступает и как несущая часть, и как полноценный функциональный орган, обеспечивающий питание и координацию движения рабочего механизма. В вакуумном шланговом подъемнике он представлен в виде пружинного балансира с длинными рукоятками, по которым обеспечивается непосредственное направление захватов. Поверхности подъемного рукава дополнительно защищаются чехлами, предотвращающими механические, тепловые и химические повреждения ответственного коммуникационного контура.

Работа системы управления
Процессы захвата и перемещения в комплексе контролирует оператор через специальный пульт. Простейшие кнопочные модули позволяют выполнять основные операции пневматической системы и кранового оборудования, а в более расширенных версиях механизмы также поддерживают вспомогательные функции:
- Экономия воздуха пневматики.
- Поворот.
- Длительное удержание на месте.
- Регулировка скорости движения.
Автоматический вакуумный подъемник может работать по заданному алгоритму в режиме циклического повторения операций без прямого участия оператора. Кроме того, в новейших системах используется беспроводной принцип коммуникации, что исключает необходимость прокладки токоведущих шин к пульту управления.
Основные характеристики оборудования

Среди основных технико-эксплуатационных параметров данного оборудования можно выделить следующие:
- Грузоподъемность – от 35 до 350 кг.
- Угол разворота – от 90° до 180°.
- Рабочее напряжение для электропривода – обычно используются однофазные сети на 220 В.
- Высота подъема – обычно ограничивается уровнем положения верхней точки крана и может достигать 2,5-3,5 м в зависимости от модели.
- Скорость перемещения вакуумного подъемника – максимум в среднем составляет 45-60 м/мин., но в современных моделях, как уже отмечалось, поддерживается возможность регулировки этого параметра.
Особенности аккумуляторных подъемников
Менее распространенная версия системы вакуумного захвата и перемещения, отличающаяся полной автономностью в ходе рабочего процесса. Присутствие в конструкции аккумуляторных батарей избавляет от необходимости подведения электрических кабелей на 12 В, что определяет и специфику применения оборудования. Такие модели используются как мобильные грузоподъемники в строительной отрасли для перемещения различных материалов с плоскими поверхностями. Например, вакуумный подъемник панелей для облицовки может использоваться и ручным способом, и механизированным. В условиях полной автономности конструкция с захваченным стройматериалом переносится двумя рабочими, а в условиях механизации эту же задачу выполняет спецтехника с приводом. Разница заключается лишь в уровнях энергоснабжения от батареи – в комплексном режиме или частично (снабжается только устройство захвата).
Заключение

Вакуумное грузоподъемное оборудование показывает собой пример сочетания технологичности, функциональности и экономности. В немалой степени объединение столь противоречивых свойств стало возможным благодаря принципу работы пневматического механизма захвата, который потребляет минимум энергии, но при этом эффективно выполняет свою задачу. В то же время остается и ряд технико-конструкционных сложностей при организации работы вакуумного подъемника именно как стационарного оборудования на производстве. Для достижения высоких показателей производительности требуется создание соответствующей инфраструктуры с силовым приводом, конструкционной базой манипуляторов и вспомогательных управляющих узлов. Впрочем, и эти недостатки уходят в прошлое по мере технологического развития и общей оптимизации вакуумно-пневматических механизмов.