














Современные роботы могут многое. Но при этом им далеко до человеческой легкости и грациозности движений. И вина тому - несовершенные искусственные мышцы. Ученые многих стран стараются решить эту проблему. Статья будет посвящена краткому обзору их удивительных изобретений.
Полимерные мышцы от сингапурских ученых
Шаг к более человекообразным роботам недавно сделали изобретатели из Национального университета Сингапура. Сегодня андроиды-тяжеловесы двигаются за счет работы гидравлических систем. Существенный минус последних - небольшая скорость. Искусственные же мышцы для роботов, представленные сингапурскими учеными, позволяют киборгам не только поднимать предметы, которые в 80 раз тяжелее их собственного веса, но и делать это так же быстро, как и человек.
Инновационная разработка, растягивающаяся в длину в пять раз, помогает "обойти" роботам даже муравьев, которые, как известно, могут переносить предметы в 20 раз тяжелее веса их собственного тельца. Полимерные мышцы обладают следующими достоинствами:
- гибкостью;
- поражающей прочностью;
- эластичностью;
- способностью менять свою форму за несколько секунд;
- возможностью преобразовывать кинетическую энергию в электрическую.
Однако на этом ученые не собираются останавливаться - в их планах создать искусственную мускулатуру, которая бы позволила роботу поднимать груз, в 500 раз тяжелее его самого!
Открытие из Гарварда - мышцы из электродов и эластомера
Изобретатели, которые трудятся в Школе прикладных и инженерных наук Гарвардского университета, представили качественно новые искусственные мышцы для так называемых "мягких" роботов. По словам ученых, их детище, состоящее из мягкого эластомера и электродов, в чьем составе углеродные нанотрубки, по своим качествам не уступает человеческой мускулатуре!
Все существующие на сегодня роботы, как уже говорилось, имеют в своей основе приводы, чей механизм - это гидравлика или пневматика. Такие системы работают за счет сжатого воздуха или реакции химических веществ. Это не позволяет сконструировать робота, такого же мягкого и быстрого, как человек. Гарвардские ученые устранили этот недостаток, создав качественно новый концепт искусственных мышц для роботов.
Новая "мускулатура" киборгов - многослойная структура, в которой электроды из нанотрубок, созданные в лаборатории Кларка, управляют верхними и нижними слоями гибких эластомеров, являющихся детищем ученых уже из Калифорнийского университета. Такие мышцы идеальны как для "мягких" андроидов, так и для лапароскопических инструментов в хирургии.
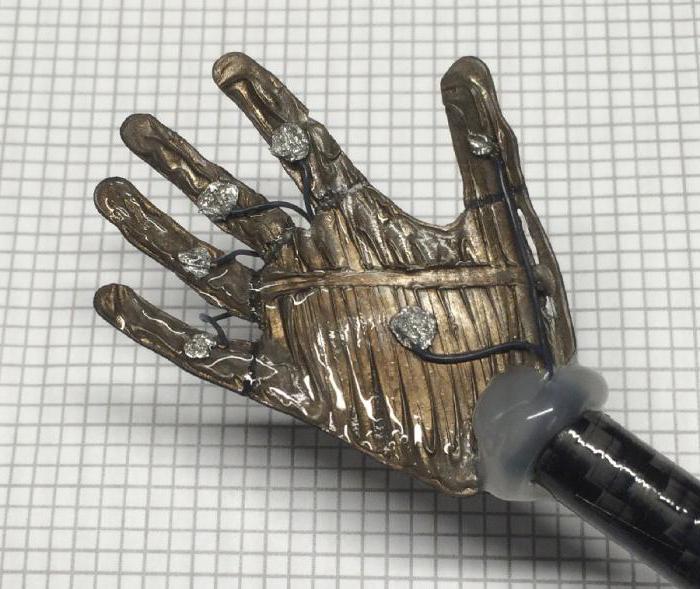
На этом замечательном изобретении гарвардские ученые не остановились. Одна из последних их разработок - это биоробот-скат. Его составляющие - клетки сердечных мышц крыс, золото и силикон.
Изобретение группы Баухмана: еще один вид искусственных мышц на основе углеродных нанотрубок
Еще в 1999 г. в австралийском городке Кирхберге на 13-й встрече Международной зимней школы по электронным свойствам инновационных материалов выступил с докладом ученый Рей Баухман, работающий в компании Allied Signal и возглавляющий международную исследовательскую группу. Его сообщение было на тему изготовления искусственных мышц.
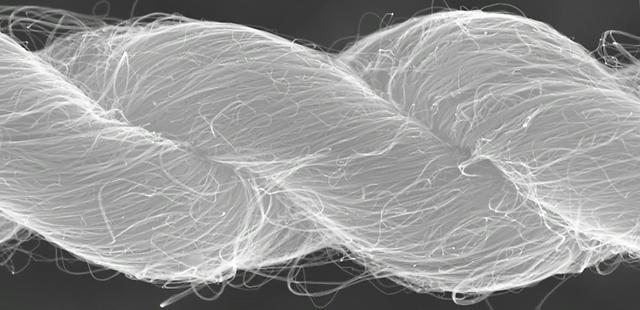
Разработчики под началом Рэя Баухмана смогли представить углеродные нанотрубки в виде листов нанобумаги. Трубочки в этом изобретении были всячески переплетены и перепутаны между собой. Сама нанобумага своим видом напоминала обычную - ее возможно было держать в руках, разрезать на полосы и кусочки.
Эксперимент группы с виду был очень прост - ученые прикрепили кусочки нанобумаги к разным сторонам клейкой ленты и опустили эту конструкцию в соляной электропроводный раствор. После того как была включена слабовольтная батарея, обе нанополоски удлинились, особенно та, что была связана с отрицательным полюсом электробатареи; затем бумага изогнулась. Модель искусственной мышцы функционировала.
Сам Баухман считает, что его изобретение после качественной модернизации существенно преобразит роботехнику, ведь такие углеродные мышцы при сгибании/разгибании создают электрический потенциал - производят энергию. К тому же такая мускулатура раза в три сильнее человеческой, может функционировать при крайне высоких и низких температурах, используя для своей работы невысокую силу тока и напряжения. Вполне возможно ее применение и для протезирования человеческих мышц.
Техасский университет: искусственные мышцы из рыболовной лески и швейных ниток
Одной из самых поразительных является работа ученой группы из Техасского университета, который расположен в Далласе. Ей удалось получить модель искусственной мускулатуры, по своей силе и мощности напоминающей реактивный двигатель - 7,1 л.с./кг! Такие мышцы в сотни раз сильнее и продуктивнее человеческих. Но самое удивительное здесь то, что их сконструировали из примитивных материалов - высокопрочной лески из полимера и швейной нитки.
Питание такой мышцы - это перепад температур. Обеспечивает его швейная нить, покрытая тонким слоем металла. Однако в будущем мышцы роботов могут подпитываться от перепадов температур окружающей их среды. Это свойство, кстати, вполне можно применять для адаптирующейся к погоде одежды и других подобных устройств.
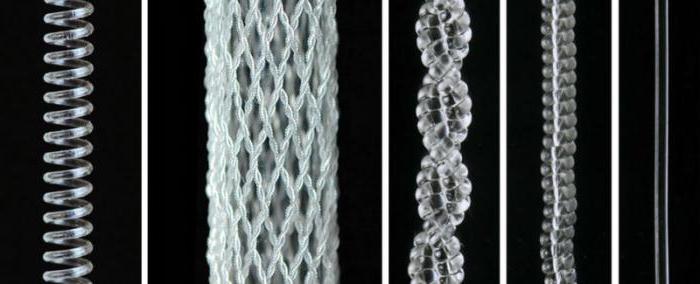
Если скручивать полимер в одну сторону, то он будет резко сжиматься при нагревании и быстро растягиваться при охлаждении, а если в другую - то в корне наоборот. Такая нехитрая конструкция может, например, вращать габаритный ротор со скоростью 10 тыс. оборотов/мин. Плюс таких искусственных мышц из лески в том, что они способны сокращаться до 50 % от своей исходной длины (человеческие только на 20 %). Кроме этого, их отличает удивительная выносливость - эта мускулатура не "устает" даже после миллионного повторения действия!
От Техаса до Амура
Открытие ученых из Далласа вдохновило немало ученых со всего мира. Успешно повторить их опыт, однако, удалось только одному роботехнику - Александру Николаевичу Семочкину, главе лаборатории информационных технологий при БГПУ.
Вначале изобретатель терпеливо ждал новых статей в Science о массовом внедрении в жизнь изобретения американских коллег. Так как этого не происходило, амурский ученый решил со своими единомышленниками повторить замечательный опыт и сотворить своими руками искусственные мышцы из медной проволоки и рыболовной лески. Но, увы, копия оказалась нежизнеспособной.
Вдохновение из "Сколково"
Вернуться к почти заброшенным опытам Александра Семочкина заставил случай - ученый попал на роботехническую конференцию в "Сколково", где познакомился с единомышленником из Зеленограда, руководителем компании "Нейроботикс". Как оказалось, инженеры этой фирмы тоже заняты созданием мышц из лесок, которые вполне себе жизнеспособны.
Вернувшись на родину, Александр Николаевич с новыми силами принялся за работу. За полтора месяца он смог не только собрать работоспособные искусственные мышцы, но и создать машину для их скручивания, которая делала витки лески строго повторяемыми.
Благовещенская искусственная мускулатура
Чтобы создать пятисантиметровую мышцу, А. Н. Семочкину нужно несколько метров проволоки и 20 см обычной рыболовной лески. Аппарат по "производству" мускулатуры, кстати, напечатанный на 3D-принтере, скручивает мышцу в течение 10 минут. Затем конструкцию на полчаса помещают в печь, раскаленную до +180 градусов по Цельсию.
Привести в действие такую мышцу можно при помощи электротока - достаточно подсоединить его источник к проволоке. В результате она начинает нагреваться и передавать свое тепло леске. Последняя вытягивается или сокращается - в зависимости от вида мышцы, которую скрутил аппарат.
Планы изобретателя
Новый проект Александра Семочкина - "научить" созданные мышцы быстрее возвращаться в исходное состояние. Этому может помочь быстрое охлаждение питающей проволоки - ученый предполагает, что такой процесс будет быстрее происходить под водой. После того как подобная мышца будет получена, первым ее обладателем станет Искандерус - антропоморфный робот БГПУ.
Ученый не держит свое изобретение в тайне - выкладывает ролики на "Ютуб", а также планирует написать статью с подробной инструкцией по созданию машинки, скручивающей мышцы из лески и проволоки.
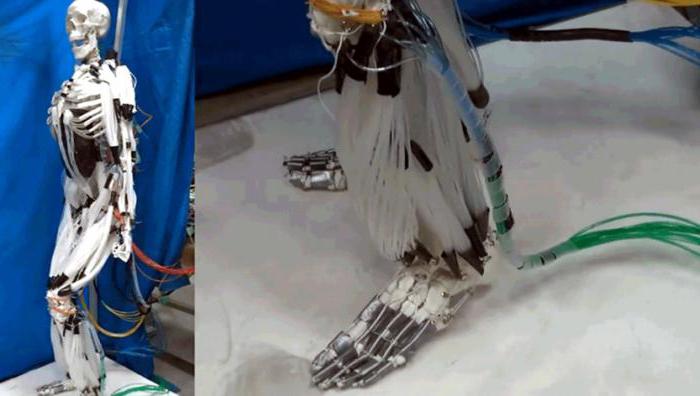
Время не стоит на месте - искусственные мышцы, о которых мы вам рассказали, уже применяются в хирургии для проведения эндо- и лапароскопических операций. А в лаборатории "Дисней" с их участием собрали функционирующую руку.











