Мы рассмотрим, как делается рука-манипулятор своими руками, на промышленных образцах. Сначала будут затронуты общие вопросы, потом технические характеристики результата, детали, а под конец и сам процесс сборки.
В целом и общем

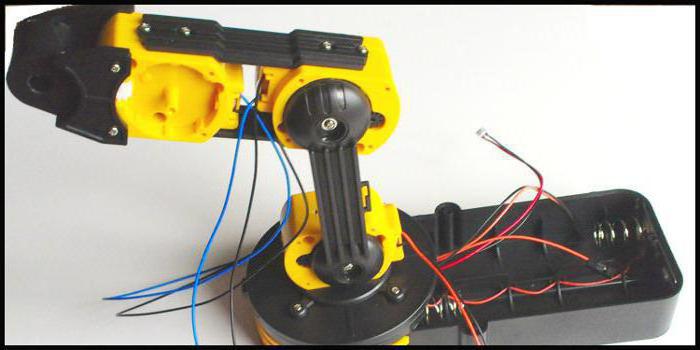
Технические характеристики результата
Будет рассматриваться образец с параметрами длины/высоты/ширины соответственно 228/380/160 миллиметров. Вес руки-манипулятора, своими руками сделанной, будет составлять примерно 1 килограмм. Для управления используется проводной дистанционный пульт. Ориентировочное время сборки при наличии опыта – около 6-8 часов. Если его нет, то могут уйти дни, недели, а при попустительстве и месяцы, чтобы была собрана рука-манипулятор. Своими руками и одному в таких случаях стоит делать разве что для своего собственного интереса. Для движения составляющих используются коллекторные моторы. Приложив достаточно усилий, можно сделать прибор, который будет поворачиваться на 360 градусов. Также для удобства работы, кроме стандартного инструментария вроде паяльника и припоя, необходимо запастись:
- Удлинёнными плоскогубцами.
- Боковыми кусачками.
- Крестовой отверткой.
- 4-мя батарейками типа D.
Пульт дистанционного управления можно реализовать, используя кнопки и микроконтроллер. При желании сделать дистанционное беспроводное управление элемент контроля действий понадобится и в руке-манипуляторе. В качестве дополнений необходимы будут только устройства (конденсаторы, резисторы, транзисторы), которые позволят стабилизировать схему и передавать по ней в нужные моменты времени ток необходимой величины.
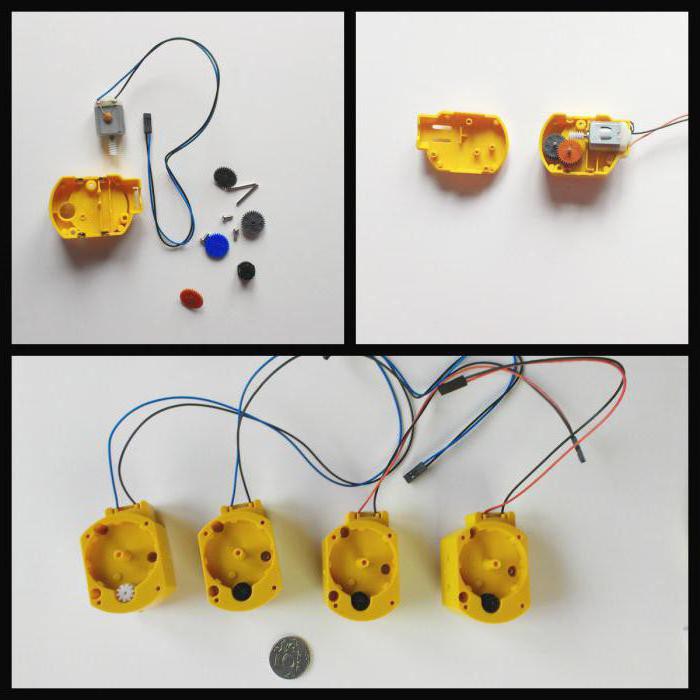
Мелкие детали
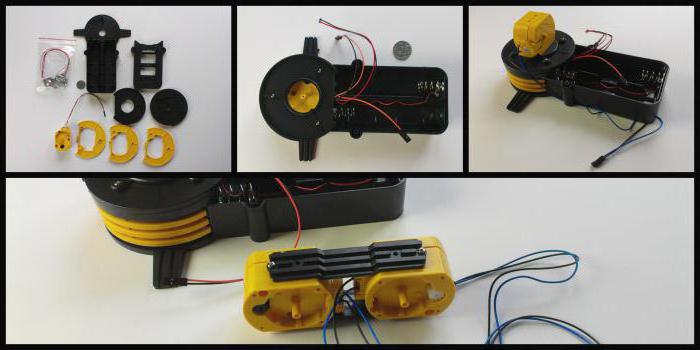
Также необходимо позаботится о том, чтобы провода не усложняли её движения. Оптимальным будет проложить их внутри конструкции. Можно сделать всё и извне, такой подход сэкономит время, но потенциально может привести к сложностям в перемещении отдельных узлов или всего устройства. А теперь: как сделать манипулятор?
Сборка в общих чертах

- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
Возможные схематические изображения результата
Любая представленная схема манипулятора может быть усовершенствована.
Заключение