





Мягкие роботы, которые изготавливают из материалов, подобных тем, из чего состоят живые организмы, более устойчивы к внешним воздействиям и легче адаптируются к ним. Но монументальной задачей является автономный контроль и управление этими деформируемыми роботами, ведь они могут двигаться в любом направлении.
Что представляют собой мягкие датчики?
Традиционные методы для достижения автономного управления используют большие системы с несколькими камерами захвата движения, которые обеспечивают роботам обратную связь в трехмерном движении и позициях. Но это нецелесообразно для мягких роботов в реальных приложениях.
Мягкие датчики, с помощью которых исследователи управляют этими роботами, представляют собой проводящие силиконовые листы, вырезанные по рисункам киригами. Они могут быть изготовлены с использованием готовых материалов, что означает, что любая лаборатория может разработать свои собственные системы, говорит Райан Труби (Ryan Truby), исследователь из MIT Computer Science and Artificial Laboratory.
«Мы проводим сенсорную проверку мягких роботов, чтобы получить обратную связь для управления от датчиков, а не от систем визуализации, используя очень простой и быстрый метод изготовления, – говорит он. – Мы хотим использовать эти мягкие роботизированные стволы, например, чтобы автоматически ориентироваться и контролировать себя, собирать вещи и взаимодействовать с миром. Это первый шаг на пути к такому более сложному автоматизированному управлению».



Одна из будущих задач состоит в том, чтобы создать искусственные конечности, которые могут лучше манипулировать предметами в окружающей среде. Говорит Даниэла Рус, директор CSAIL и профессор кафедры электротехники: «Мы хотим разработать те же возможности для мягких роботов».
Формирование мягких датчиков
Длительная задача в мягкой робототехнике – полностью интегрированные датчики тела. Традиционные жесткие датчики ухудшают естественную совместимость корпуса мягкого робота, усложняют его конструкцию. Их изготовление может вызывать различные механические неисправности.
Датчики на основе мягких материалов являются более подходящей альтернативой, но для их разработки требуются специальные материалы и методы, что затрудняет изготовление и интеграцию многих робототехнических лабораторий.
Однажды работая в своей лаборатории CSAIL в поисках вдохновения для сенсорных материалов, Райан Труби нашел интересную связь. «Я нашел эти листы проводящих материалов, используемых для защиты от электромагнитных помех, которые можно купить в любом месте в рулонах», – говорит он. Они могут изменить электрическое сопротивление, которое затем будет преобразовано во входное напряжение.



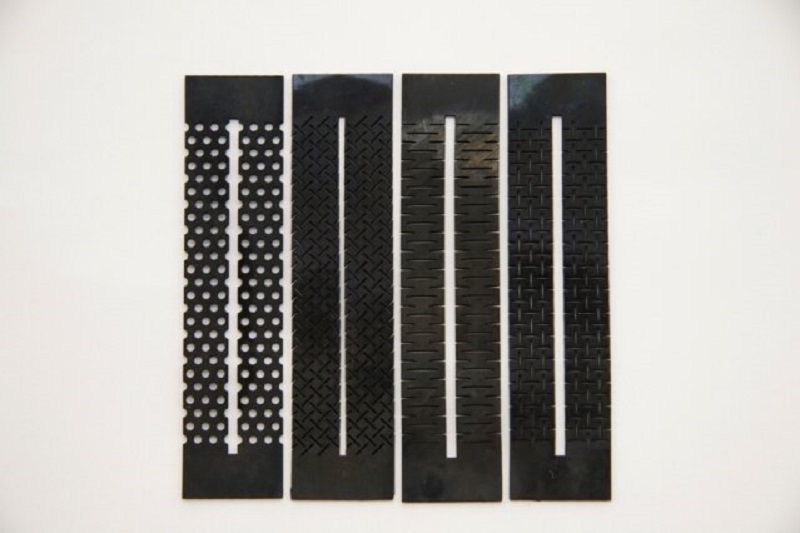
Но материал не сильно растягивался, что ограничивало бы его использование для мягкой робототехники. Труби разработал и разрезал лазером прямоугольные полоски проводящих силиконовых листов на различные узоры, такие как ряды крошечных отверстий или перекрещивающиеся кусочки, такие как забор из звенья цепи.
«Это сделало их намного более гибкими, растягивающимися и красивыми, – говорит Труби. Роботизированный ствол состоит из трех сегментов, каждый из которых имеет четыре гидравлических привода (всего 12), используемых для перемещения руки. Они объединили один датчик в каждом сегменте, причем каждый датчик покрывал и собирал данные от одного встроенного привода в мягком роботе.
Они использовали «плазменную связь» - технику, которая возбуждает поверхность материала, чтобы связать его с другим материалом. Требуется примерно пара часов, чтобы сформировать десятки датчиков, которые могут быть связаны с мягкими роботами с помощью ручного устройства для плазменной связи. Как и предполагалось, датчики зафиксировали общее движение.
Но они были действительно шумными. «По сути, они неидеальные датчики во многих отношениях, – говорит Труби. - Но это просто распространенный факт изготовления датчиков из мягких проводящих материалов. Для более эффективных и надежных требуются специальные инструменты, которых нет в большинстве лабораторий робототехники».
Заключение
Ученые стремятся исследовать новые конструкции датчиков для повышения чувствительности и разрабатывать новые модели и методы глубокого обучения, чтобы уменьшить необходимое обучение для каждого нового мягкого робота. Они также надеются усовершенствовать систему, чтобы лучше улавливать полные динамические движения робота. В настоящее время нейронная сеть и сенсорная кожа не чувствительны к захвату тонких движений или динамических движений. Но на данный момент это важный первый шаг для основанных на обучении подходов к управлению мягким роботом.








