














Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
Схема вентильного двигателя
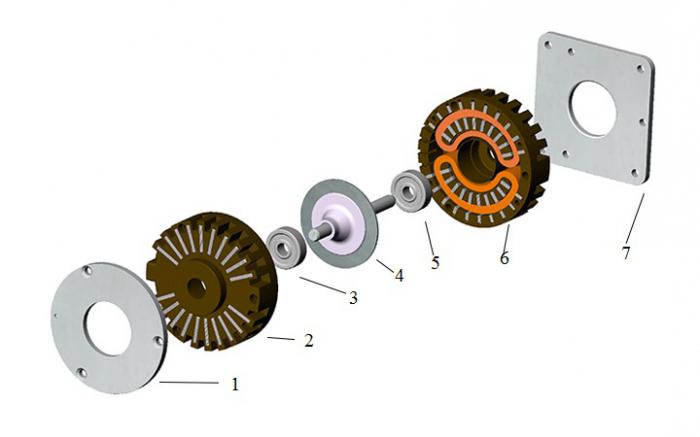
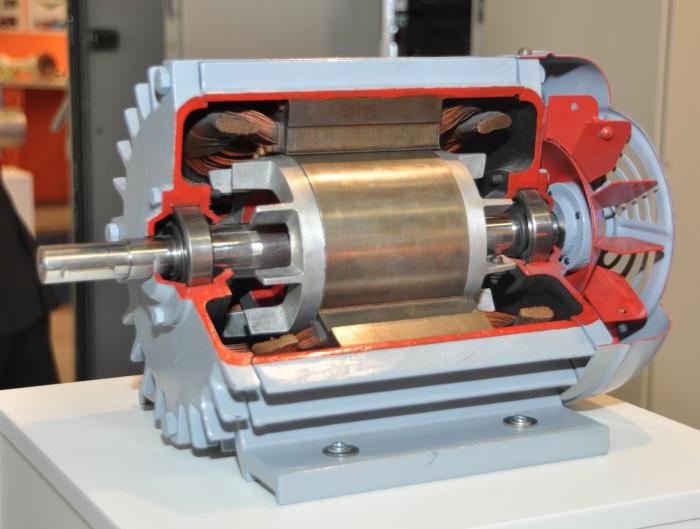
Двигатель состоит из следующих деталей:
1. Задняя часть корпуса.
2. Статор.
3. Подшипник.
4. Магнитный диск (ротор).
5. Подшипник.
6. Статор с обмоткой.
7. Передняя часть корпуса.
У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название.
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, трельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов.
В случае соединения обмоток «звездой» устройство имеет большие постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов.
Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.
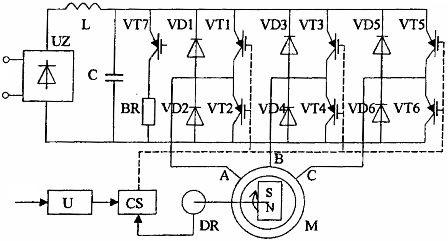
Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.
Условные обозначения:
- VT1-VT7 - транзисторные коммуникаторы;
- A, B, C – фазы обмоток;
- M – момент двигателя;
- DR – датчик положения ротора;
- U – регулятор напряжения питания двигателя;
- S (south), N (north) – направление магнита;
- UZ – частотный преобразователь;
- BR – датчик частоты вращения;
- VD – стабилитрон;
- L – катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции.
Принципы работы
На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него.
Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора.
Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Преимущества
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
- возможность применения широкого диапазона для модифицирования частоты вращения;
- высокая динамика и быстродействие;
- максимальная точность позиционирования;
- небольшие затраты на техническое обслуживание;
- устройство можно отнести к взрывозащищенным объектам;
- имеет способность переносить большие перегрузки в момент вращения;
- высокий КПД, который составляет более 90%;
- имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
- при длительной работе нет перегрева электродвигателя.
Недостатки
Несмотря на огромное количество достоинств, вентильный двигатель также имеет и недостатки в эксплуатации:
- довольно сложное управление электродвигателем;
- относительно высокая цена устройства из-за применения в его конструкции ротора, который имеет дорогостоящие постоянные магниты.
Вентильный индукторный двигатель

Вентильно-индукторный двигатель – это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора.
Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
Свойства двигателя
Такие устройства обладают высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в них отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Вентильные двигатели постоянного тока
Все двигатели постоянного тока можно назвать бесколлекторными. Они работают от сети с постоянным током. Щеточный узел предусмотрен для электрического объединения цепей ротора и статора. Такая деталь является самой уязвимой и достаточно сложной в обслуживании и ремонте.
Вентильный двигатель постоянного тока работает по тому же принципу, что и все синхронные устройства такого типа. Он представляет собой замкнутую систему, включающую силовой полупроводниковый преобразователь, датчик положения ротора и координатор.
Вентильные двигатели переменного тока
Такие устройства получают свое питание от сетей переменного тока. Скорость вращения ротора и движения первой гармоники магнитной силы статора полностью совпадают. Данный подтип двигателей можно использовать при высоких мощностях. К этой группе относятся шаговые и реактивные вентильные аппараты. Отличительной особенностью шаговых устройств является дискретное угловое смещение ротора при его работе. Питание обмоток формируется при помощи полупроводниковых компонентов. Управление вентильным двигателем осуществляется при последовательном смещении ротора, которое и создает переключение его питания с одних обмоток на другие. Это устройство можно разделить на одно-, трех- и многофазные, первые из которых могут содержать пусковую обмотку или фазосдвигающую цепь, а также запускаться вручную.
Принцип работы синхронного двигателя
Вентильный синхронный двигатель работает на основе взаимодействия магнитных полей ротора и статора. Схематически магнитное поле при вращении можно изобразить плюсами этих же магнитов, которые движутся со скоростью магнитного поля статора. Поле ротора также возможно изобразить как постоянный магнит, который делает обороты синхронно с полем статора. В случае отсутствия внешнего вращающего момента, который прикладывается к валу аппарата, оси полностью совпадают. Воздействующие силы притяжения проходят вдоль всей оси полюсов и могут компенсировать друг друга. Угол между ними приравнивается к нулю.
В случае если на вал машины будет воздействовать тормозной момент, то ротор перемещается в сторону с запаздыванием. Благодаря этому силы притяжения разбиваются на составляющие, которые направляются вдоль оси плюсовых показателей и перпендикулярно к оси полюсов. Если будет прикладываться внешний момент, который создает ускорение, то есть начинает действовать по направлению вращения вала, картинка по взаимодействию полей полностью изменится на обратную. Направленность углового смещения начинает трансформироваться на противоположное, и в связи с этим меняется направление тангенциальных сил и воздействие электромагнитного момента. При таком раскладе двигатель становится тормозным, а аппарат работает как генератор, который подводимую к валу механическую энергию преобразует в электрическую. Далее она перенаправляется в сеть, питающую статор.
Когда будет отсутствовать внешний, явнополюсный момент начнет принимать положение, при котором ось полюсов магнитного поля статора будет совпадать с продольной. Это размещение станет соответствовать минимальному сопротивлению потока в статоре.
В случае воздействия на вал машины тормозного момента ротор отклонится, при этом магнитное поле статора будет деформированным, так как поток стремится замкнуться по наименьшему сопротивлению. Для его определения необходимы силовые линии, направленность которых в каждой из точек будет соответствовать движению действия силы, поэтому изменение поля приведет к появлению тангенциального взаимодействия.
Рассмотрев все эти процессы в синхронных двигателях, можно выявить демонстративный принцип обратимости разнообразных машин, то есть возможность любого электрического аппарата изменить направленность преобразованной энергии на противоположную.
Бесколлекторные двигатели с постоянными магнитами

Вентильный двигатель с постоянными магнитами используется для решения серьезных оборонных и промышленных задач, так как такое устройство имеет большой запас мощности и эффективности.
Эти приборы чаще всего применяются в отраслях, где необходимы сравнительно низкие потребляющие мощности и небольшие габариты. Они могут иметь самые разные габариты, без технологических ограничений. В то же время большие аппараты не являются совершенно новыми, их чаще всего производят компании, которые стремятся преодолеть экономические трудности, ограничивающие ассортимент этих приборов. У них есть свои преимущества, среди которых можно отметить высокую эффективность из-за потерь в роторе и большую плотность мощности. Для управления бесколлекторными двигателями нужен частотно-регулируемый привод.
Анализ по затратам и результатам показывает, что устройства с постоянными магнитами намного предпочтительнее, по сравнению с другими, альтернативными технологиями. Чаще всего они используются для отраслей промышленности с достаточно тяжелым распорядком работы судовых двигателей, в военной и оборонной отрасли и других подразделениях, число которых непрерывно возрастает.
Реактивный двигатель
Вентильно-реактивный двигатель работает с использованием двухфазных обмоток, которые установлены вокруг диаметрально противоположных полюсов статора. Подача питания продвигается к ротору в соответствии с полюсами. Таким образом, его противодействие полностью сводится к минимуму.
Вентильный двигатель, своими руками созданный, обеспечивает высокоэффективную скорость привода при оптимизированном магнетизме для работы с реверсом. Информация о месторасположении ротора используется для того, чтобы управлять фазами подачи напряжения, так как это является оптимальным для достижения непрерывного и плавного крутящего момента и высокой эффективности.
Сигналы, которые выдает реактивный двигатель, накладываются на угловую ненасыщенную фазу индуктивности. Минимальное сопротивление полюса полностью соответствует максимальной индуктивности устройства.
Положительный момент можно получить только при углах, когда показатели позитивные. На небольших скоростях фазный ток обязательно должен быть ограниченным, чтобы произвести защиту электроники от высоких вольт-секунд.
Механизм преобразования можно иллюстрировать линией реактивной энергии. Мощностная сфера характеризует собой питание, которое преобразовывается в механическую энергию. В случае его резкого отключения избыточная или остаточная сила возвращается к статору. Минимальные показатели влияния магнитного поля на производительность устройства являются основным его отличием от похожих устройств.











