





Команда инженеров Гарвардского университета разработала ботов, способных имитировать коллективное поведение рыб. Косяки роботов под водой координируют свои действия без какого-либо стороннего воздействия. Столь сложное поведение было впервые продемонстрировано в роботизированном устройстве.
Вдохновение природой

Настоящие рыбы показывают пример слаженных действий при выполнении различных задач: от поиска пищи до миграции и уклонения от хищников. Этим поведением вдохновились специалисты Гарвардского университета, усилиями которых были созданы роботизированные рыбы.
В числе принципиальных условий стояло обеспечение автономности, то есть исключалась какая-либо возможность внешнего влияния на роботов с подачей конкретных сигналов и команд.
По словам авторов проекта, получившего название Blueswarm, разработка в будущем может использоваться для мониторинга определенных параметров окружающей среды, поисковых работ в труднодоступных средах и т.д. Спрос на высокотехнологичные аппараты, которые можно применять в опасных условиях, также возрастает.
Технологическое обеспечение
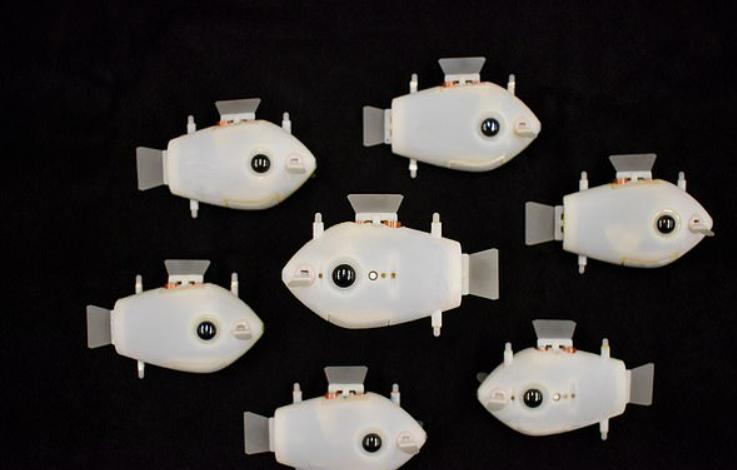
Робот Bluebot может работать в трехмерных пространствах – в воздушной и водной средах. Для взаимодействия с окружающей средой используются синие светодиодные фонари, а также набор камер для навигации.



Под водой, где недоступны средства GPS и Wi-Fi, пришлось использовать альтернативные технологии коммуникации. Та же автономность обеспечивалась посредством способности каждой рыбы ориентироваться в пространстве, опираясь в том числе на расчетные данные относительно положения других светящихся рыб-ботов.
Переход в трехмерное пространство
Прежде эта же команда ученых создала большую группу тысячи роботов-строителей и роботов-килоботов, которые воссоздавали поведение термитов. Но тогда модель ограничивалась лишь действиями в 2D-пространстве.
Для расширения возможностей идеи имитации коллективного поведения животных ученые разработали новую систему координации на основе визуального слежения. Эти функции и выполняются светодиодными синими огнями и камерами, которые их распознают. У каждого робота три лампы и две камеры, отслеживающие свечение по своему собственному алгоритму. Далее электроника вычисляет расстояния и определяет направления для дальнейшего движения.

Достаточно простой механизм обнаружения света позволил на практике продемонстрировать, как рыбы-боты могут показывать сложные модели самоорганизованного поведения. В частности, косяк роботов мог демонстрировать агрегацию, рассредоточение и создание круга. При этом контакт друг с другом рыбы не утрачивали.



Разработчики отмечают, в частности, что для агрегирования достаточно, чтобы каждый робот выполнял несложные вычисления расстояния относительно соседних рыб-ботов и двигался по направлению к центру.
Чтобы заставить роботов разойтись, действует обратная модель принятия решений. По кругу косяк плавает, если программа предполагает следование за огнями друг перед другом по часовой стрелке.
Поисковый эксперимент
Для более наглядной демонстрации практических возможностей созданных рыб инженеры смоделировали несложную поисковую миссию. Они применили алгоритм рассеивания, когда Bluebots распространяются по специальному резервуару. Задача заключается в том, чтобы обнаружить источник красного света. Как только один из роботов приблизится к нему на достаточное для обнаружения расстояние, миссия будет выполнена. После обнаружения красного света у нашедшего бота светодиоды начинают работать в режиме мигания, а затем активизируется алгоритм агрегации остальных участников косяка. В итоге все роботы собираются у главного сигнального бота.
Исследовательские цели

У этого проекта есть три базовых направления. В первую очередь, техническая разработка базы для создания группы подводных роботов, которые будут достаточно маневренны для быстрых и точных движений под водой. Второе направление сводится к разработке интеллектуальной платформы, в которую входят алгоритмы и новые методы программирования. Эта часть обеспечила возможность выполнения сложных локальных и глобальных моделей коллективного поведения в трехмерном пространстве. Третье направление ставит научные цели в понимании биомеханики и социальных коммуникаций рыб.
Ученые подчеркивают, что выводы данного исследования помогут в создании будущих миниатюрных подводных роботов, которые смогут выполнять сложные задачи. Особенно рыбы Bluebots и подобные устройства могут быть полезны в хрупких подводных средах наподобие коралловых рифов, где другими техническими средствами обойтись не получится.

Кроме того, это исследование также решает и задачи изучения косяков рыб с точки зрения биологов. Например, воссозданные модели дают возможность лучше понять особенности и закономерности их коллективного поведения.
Развитие робототехники
С точки зрения сферы робототехники данный проект открывает новые возможности в двух аспектах. Во-первых, он демонстрирует, насколько эффективны могут быть модели полуцентрализованной коммуникации, основанной на местном восприятии. То есть когда рыбы-боты могут действовать по определенным алгоритмам без внешнего управления, ориентируясь на сигналы других роботов. Во-вторых, 3D-маневренность роботов особенно с учетом организации высокоавтономных движений дает и новое представление о способах подключения техники для реализации сложных операций под водой.








