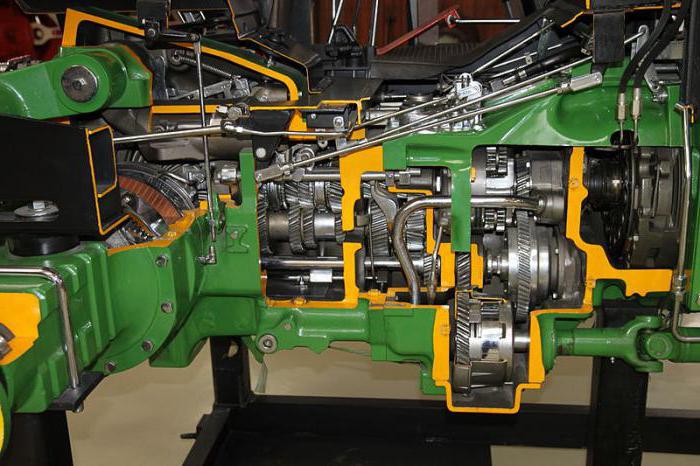
Любой сложный механизм в машиностроении состоит из совокупности простых элементов. Чтобы понять, как функционирует система в целом, необходимо разобрать работу каждого узла. А это, прежде всего, понимание того, что такое кинематическая пара.
Основные термины
Если взять два предмета (звена), которые соприкасаются между собой, и при этом такая связь является подвижной, то перед нами кинематическая пара (КП). Отличительной ее особенностью является некая ограниченность в движении звеньев.
Твердое тело может иметь ограниченную возможность движения, и тогда возникает такое понятие, как условие связи. До пяти условий связи насчитывают, рассматривая взаимодействие звеньев в паре. Отсюда же деление на классы. Их вывели пять для кинематических пар, каждый из них обладает своей степенью подвижности. В классе насчитывают шесть степеней подвижности. Вся современная механика базируется на применении последних трех классов кинематических пар.
Каждое тело (звено) имеет свою геометрию. Поэтому и соприкасаются между собой элементы, соответствующими этой форме частями. Выходит, что КП сможет выполнить только такое движение, какое не будет противоречить геометрии звеньев. Кроме того, чтобы совершить любое движение относительно друг друга, одно звено должно быть стационарно закреплено, а на второе в паре оказано воздействие.
Каждая точка в звене в момент совершения движения проходит путь (траекторию). Эта траектория может иметь вид кривой, расположенной на плоскости. Когда плоскости расположения кривых прохождения пути звеньев в паре параллельны друг другу – это плоская пара. Если же кривые движения точек звеньев расположены в трехмерном пространстве, кинематическая пара является пространственной.
Виды
Существуют следующие разновидности механизмов.
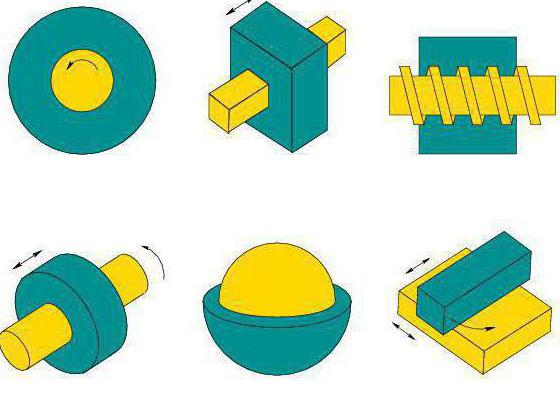
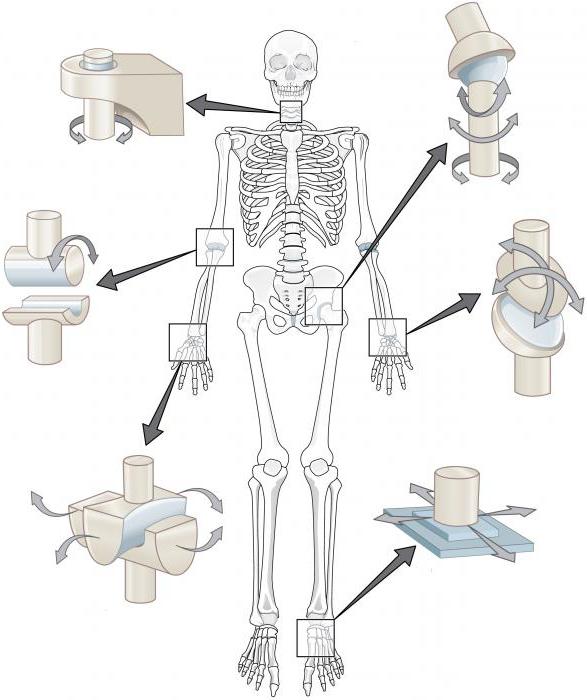
Пара вращательного типа является одноподвижной системой. Звенья, составляющие такую пару, способны совершать только характерное вращение около стержня или оси. В этом случае соприкосновение элементов осуществляется по поверхности цилиндрической формы. Такая геометрическая система замкнута и относится к низшим. Механизм-аналог в области высших пар есть шариковый подшипник.
Пара поступательного взаимодействия такая же, как и предыдущая, в плане одноподвижности. В такой системе звенья могут совершать только поступательное движение в прямолинейном направлении. Механизм является низшей парой, замкнутой по геометрическим параметрам.
Пара типа взаимодействующих цилиндров. Эта система уже двухподвижна, геометрия ее является замкнутой. Она низшая - звенья могут как вращаться, так и двигаться вдоль в прямом направлении.
Пара сферического типа является трехподвижной системой. Свобода такой пары имеет степень, позволяющую звеньям ее вращаться в трехмерном пространстве, описывая оси координат. Также является низшим геометрически замкнутым механизмом.
Пара сферического типа с пальцем – двухподвижная. Движение (относительно независимое вращение) звеньев в этой паре ограничено пальцем и прорезью. Пара низшего порядка геометрически замкнута.
Пара винтового типа имеет одноподвижную степень свободы. Механизм низшего порядка представляет собой геометрически замкнутую систему, в которой возможно движение только винтового характера с соблюдением определенного шага. Перемещение в угловом и линейном направлении строго однозначно.
Пара плоского типа, плоскость-цилиндр, плоскость-шар. В этих механизмах применяют силовое замыкание. По классу первая относится к низшим, остальные - к высшим системам. На практике такие кинематические пары звеньев не нашли применения.
Классификация
КП имеют следующую классификацию.
- По виду связи в месте соприкосновения.
Пары низшего порядка контактируют звеньями по поверхностям. Они нашли широкое применение в механике, имеют более простое конструктивное исполнение, чем высшие пары. Конструктивно их звенья соприкасаются плоскостями и скользят по ним. Таким образом происходит равномерное распределение нагрузки внутри элемента, но трение в точке соединения звеньев, соответственно, возрастает. Положительным моментом пар низшего порядка является то, что можно от звена к звену передавать большие нагрузки.
Высшие кинематические пары имеют контакт звеньев по кривой или в точках. Основное их назначение - снижать степень трения между элементами звеньев при движении. Классический пример высших пар - это подшипники либо ролики. Внутреннее конструктивное исполнение этих элементов на движение звеньев, соединяемых в пару, не влияет. Чтобы упростить механизм, применяют методы замены высших кинематических пар низшими аналогами.
- По виду относительного движения, которое совершают звенья пары.
- Вращательное.
- Поступательное.
- Цилиндрическое.
- Сферическое.
- Винтовое.
- Плоское.
Если в механизме присутствуют только пары, использующие исключительно первые четыре типа движения, то он называется рычажным.
- По виду обеспечения связи между звеньями.
- За счет силового воздействия, например давления пружины, массы тела, сжатого газа либо жидкости, инерционных сил.
- За счет геометрического конструктивного исполнения элементов пары.
- По степени подвижности звеньев при движении.
- По количеству условий связи.
Обратимые и необратимые механизмы
По возможности движения звеньев в системе относительно выбора условно неподвижного звена различают обратимые и необратимые КП.
Если в механизме любой элемент в свободном состоянии повторяет относительное движение элемента в условно неподвижном состоянии, то кинематическая пара считается обратимой (пример - одноподвижные пары).
Если в механизме каждый элемент в свободном состоянии совершает свое относительное движение отличное от других, то такая пара является необратимой.
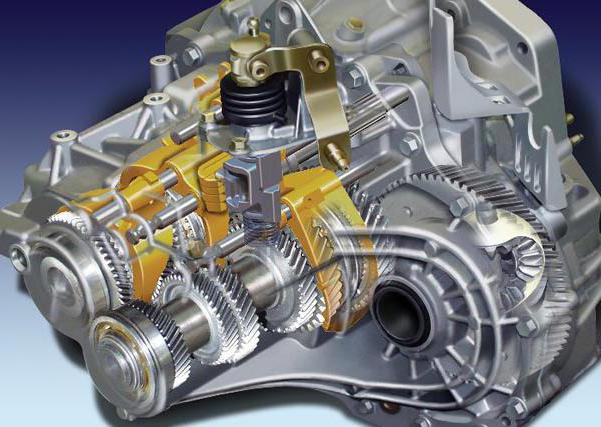
Виды передач в механике
Под механической передачей понимают механическую систему, которая преобразует кинематику и энергию двигателя в вид, приемлемый для использования рабочими органами машин, чтобы функционировать в заданном режиме.
Передачи бывают:
- Зубчатого типа. Такая связь построена на цилиндрических и конических элементах. Первые передают движение в одной плоскости, вторые - под углом. Зубчатые передачи характеризуются компактностью и возможностью передачи больших мощностей. Они высокоэффективны, но создают во время работы шум и требуют смазки.
- Винтового типа. Кроме классической винтовой, в эту категорию входят гипоидные и червячные передачи. Последний вид механической передачи применяют в том случае, когда необходимо получить большое передаточное отношение. Также они отличаются бесшумностью и плавностью в работе и способностью к самоторможению. К недостаткам можно отнести маленький КПД и высокий износ.
- На гибких элементах. Здесь движение и энергия передаются в одной плоскости за счет различных ремней и цепей. Ременные передачи отличаются простотой и возможностью охвата больших расстояний.
- Фрикционного типа. В связях такого характера применяется сила трения. Используют их в механизмах, эксплуатация которых проходит в тяжелых условиях.

Шаровой тип шарнира
Основное назначение шарового шарнира, чтобы поперечная тяга рулевой рейки могла соединиться через рычаг с поворотной стойкой колеса. В конструкцию шарнира входит наконечник; в него встроены сухари, пружина, прижимной колпачок, шаровой палец, масленка. Пружина давит на сухари шарового шарнира, которые поверхностями сферической формы удерживают палец. Такая конструкция обеспечивает работоспособность механизма даже при его износе.

Шарнирная петля
Петли или навесы – механизмы, построенные на основе цилиндрического шарнира. Они служат для того, чтобы могли открываться и закрываться двери, окна, мебельные дверцы. Конструкция петли включает два прямоугольных полотна (карты), в которых просверлены отверстия крепления и стержень. Изготавливают шарнирные петли в основном из стали и различных сплавов.
Заключение
Интересно то, что человеческие суставы представляют собой все основные виды кинематических пар, описанных выше. Поэтому очевидна необходимость в понимании процессов, протекающих в механике.