Одним из фундаментальных разделов математического анализа является интегральное исчисление. Охватывает оно широчайшее поле объектов, где первый - это неопределенный интеграл. Позиционировать его стоит как ключ, что еще в средней школе раскрывает все большее количество перспектив и возможностей, которые описывает высшая математика.
Появление
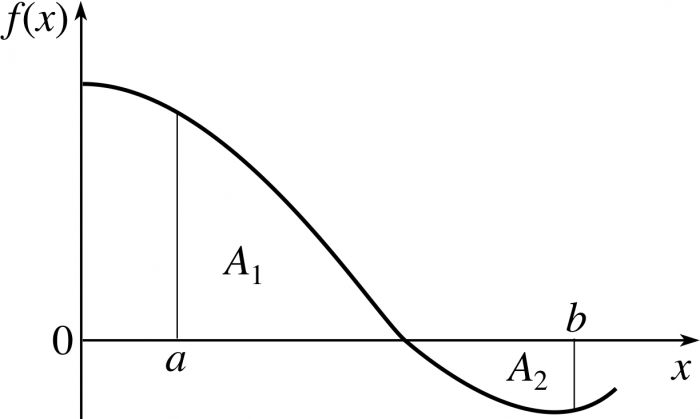
На первый взгляд интеграл кажется донельзя современным, актуальным, однако на практике оказывается, что появился он еще в 1800 году до нашей эры. Родиной официально считается Египет, так как до нас не дошли более ранние доказательства его существования. Его, в силу недостатка информации, все это время позиционировали просто как явление. Он лишний раз подтверждал уровень развития науки у народов тех времен. Наконец были найдены труды древнегреческих математиков, датируемые 4 веком до нашей эры. В них описывался метод, где применялся неопределенный интеграл, суть которого заключалась в поиске объема или площади криволинейной фигуры (трехмерные и двухмерные плоскости соответственно). Принцип вычисления базировался на делении исходной фигуры на бесконечно малые составляющие, при условии что объем (площадь) их уже известен. С течением времени метод разросся, Архимед использовал его для поиска площади параболы. Аналогичные вычисления в то же время проводили ученые и в Древнем Китае, причем они были совершенно независимы от греческих собратьев по науке.
Развитие
Следующим прорывом в XI веке уже нашей эры стали работы арабского ученого-"универсала" Абу Али аль-Басри, который раздвинул границы уже известного, выведя на основе интеграла формулы для вычисления сумм рядов и сумм степеней от первой до четвертой, применяя для этого известный нам метод математической индукции.
Умы современности восхищаются тем, как древние египтяне создавали удивительные памятники архитектуры, не имея никаких особых приспособлений, за исключением разве что своих рук, но разве не является сила ума ученых того времени не меньшим чудом? По сравнению с нынешними временами их жизнь кажется чуть ли не первобытной, однако решение неопределенных интегралов выводилось повсеместно и использовалось на практике для дальнейшего развития.
Очередной шаг произошел в XVI веке, когда итальянский математик Кавальери вывел метод неделимых, который подхватил Пьер Ферма. Именно эти две личности положили основу современному интегральному исчислению, которое известно на данный момент. Они связали понятия дифференцирования и интегрирования, которые ранее воспринимались как автономные единицы. По большому счету, математика тех времен была раздроблена, частицы выводов существовали сами по себе, имея ограниченную область применения. Путь объединения и поиска точек соприкосновения был единственным верным на тот момент, благодаря ему современный математический анализ получил возможность расти и развиваться.
С течением времени менялось все, и обозначение интеграла в том числе. По большому счету, обозначали его ученые кто во что горазд, например, Ньютон использовал квадратный значок, в который помещал интегрируемую функцию или же просто ставил рядом.

Формальное определение
Неопределенный интеграл напрямую зависит от определения первообразной, поэтому рассмотрим ее в первую очередь.
Первообразная - это функция, обратная производной, на практике ее еще называют примитивной. Иначе: первообразная от функции d - это такая функция D, производная которой равна v <=> V' = v. Поиск первообразной есть вычисление неопределенного интеграла, а сам этот процесс именуется интегрированием.
Пример:
Функция s(y) = y3, а ее первообразная S(y) = (y4/4).
Множество всех первообразных рассматриваемой функции - это и есть неопределенный интеграл, обозначается он следующим образом: ∫v(x)dx.
В силу того что V(x) - это лишь некоторая первообразная исходной функции, имеет место выражение: ∫v(x)dx = V(x) + C, где С - константа. Под произвольной постоянной понимается любая константа, так как ее производная равна нулю.
Свойства
Свойства, которыми обладает неопределенный интеграл, базируются на основном определении и свойствах производных.
Рассмотрим ключевые моменты:
- интеграл из производной первообразной есть сама первообразная плюс произвольная константа С <=> ∫V'(x)dx = V(x) + C;
- производная от интеграла функции есть исходная функция <=> (∫v(x)dx)' = v(x);
- константа выносится из под знака интеграла <=> ∫kv(x)dx = k∫v(x)dx, где k - произвольно;
- интеграл, который берется от суммы, тождественно равен сумме интегралов <=> ∫(v(y) + w(y))dy = ∫v(y)dy +∫w(y)dy.
Из последних двух свойств можно сделать вывод, что неопределенный интеграл является линейным. Благодаря этому имеем: ∫(kv(y)dy +∫ lw(y))dy = k∫v(y)dy + l∫w(y)dy.
Для закрепления рассмотрим примеры решения неопределенных интегралов.
Необходимо найти интеграл ∫(3sinx + 4cosx)dx:
- ∫(3sinx + 4cosx)dx = ∫3sinxdx + ∫4cosxdx=3∫sinxdx + 4∫cosxdx = 3(-cosx) + 4sinx + C = 4sinx - 3cosx + C.
Из примера можно сделать вывод: не знаете, как решать неопределенные интегралы? Просто найдите все первообразные! А вот принципы поиска рассмотрим ниже.
Методы и примеры
Для того чтобы решить интеграл, можно прибегнуть к следующим способам:
- воспользоваться готовой таблицей;
- интегрировать по частям;
- интегрировать путем замены переменной;
- подведение под знак дифференциала.
Таблицы
Самый простой и приятный способ. На данный момент математический анализ может похвастаться достаточно обширными таблицами, в которых прописаны основные формулы неопределенных интегралов. Иными словами, есть шаблоны, выведенные до вас и для вас, остается лишь воспользоваться ими. Вот перечень основных табличных позиций, к которым можно вывести практически каждый пример, имеющий решение:
- ∫0dy = C, где С - константа;
- ∫dy = y + C, где С - константа;
- ∫yndy = (yn+1) / (n + 1) + C, где С - константа, а n - отличное от единицы число;
- ∫(1/y)dy = ln|y| + C, где С - константа;
- ∫eydy = ey + C, где С - константа;
- ∫kydy = (ky/ln k) + C, где С - константа;
- ∫cosydy = siny + C, где С - константа;
- ∫sinydy = -cosy + C, где С - константа;
- ∫dy/cos2y = tgy + C, где С - константа;
- ∫dy/sin2y = -ctgy + C, где С - константа;
- ∫dy/(1 + y2) = arctgy + C, где С - константа;
- ∫chydy = shy + C, где С - константа;
- ∫shydy = chy + C, где С - константа.

При необходимости совершить пару шагов, привести подынтегральное выражение к табличному виду и наслаждаться победой. Пример: ∫cos(5x -2)dx = 1/5∫cos(5x - 2)d(5x - 2) = 1/5 х sin(5x - 2) + C.
По решению видно, что для табличного примера подынтегральному выражению не хватает множителя 5. Мы добавляем его, параллельно с этим умножая на 1/5 для того, чтобы общее выражение не изменилось.
Интегрирование по частям
Рассмотрим две функци - z(y) и x(y). Они должны быть непрерывно дифференцируемы на всей области определения. По одному из свойств дифференцирования имеем: d(xz) = xdz + zdx. Проинтегрировав обе части равенства, получаем: ∫d(xz) = ∫(xdz + zdx) => zx = ∫zdx + ∫xdz.
Переписав полученное равенство, получаем формулу, которая описывает метод интегрирования по частям: ∫zdx = zx - ∫xdz.
Зачем она нужна? Дело в том, что некоторые примеры есть возможность упростить, условно говоря, свести ∫zdx к ∫xdz, если последний близок к табличной форме. Также данную формулу можно применять не единожды, добиваясь оптимального результата.
Как решать неопределенные интегралы данным способом:
- необходимо вычислить ∫(s + 1)e2sds
∫(x + 1)e2sds = {z = s+1, dz = ds, y = 1/2e2s, dy = e2xds} = ((s+1)e2s) / 2-1/2∫e2sdx = ((s+1)e2s) / 2-e2s/4 + C;
- необходимо вычислить ∫lnsds
∫lnsds = {z = lns, dz = ds/s, y = s, dy = ds} = slns - ∫s х ds/s = slns - ∫ds = slns -s + C = s(lns-1) + C.
Замена переменной
Этот принцип решения неопределенных интегралов не менее востребован, чем два предыдущих, хоть и сложнее. Метод заключается в следующем: пусть V(x) - интеграл от некой функции v(x). В том случае, если сам по себе интеграл в примере попадается сложносочиненный, велика вероятность запутаться и пойти по неверному пути решения. Во избежание этого практикуется переход от переменной x к z, при котором общее выражение визуально упрощается при сохранении зависимости z от x.
На математическом языке это выглядит следующим образом: ∫v(x)dx = ∫v(y(z))y'(z)dz = V(z )= V(y-1(x)), где x = y(z) - подстановка. И, конечно же, обратная функция z = y-1(x) полноценно описывает зависимость и взаимосвязь переменных. Важное замечание - дифференциал dx обязательно заменяется новым дифференциалом dz, так как замена переменной в неопределенном интеграле подразумевает замену ее везде, а не только в подынтегральном выражении.
Пример:
- необходимо найти ∫(s + 1) / (s2 + 2s - 5)ds
Применим подстановку z=(s+1)/(s2+2s-5). Тогда dz=2sds=2+2(s+1)ds <=> (s+1)ds=dz/2. В итоге получаем следующее выражение, которое очень легко вычислить:
∫(s+1)/(s2+2s-5)ds=∫(dz/2)/z=1/2ln|z|+C=1/2ln|s2+2s-5|+C;
- необходимо найти интеграл ∫2sesdx
Для решения перепишем выражение в следующей форме:
∫2sesds = ∫(2e)sds.
Обозначим через a=2e (заменой аргумента данный шаг не является, это все еще s), приводим наш, на первый взгляд сложный, интеграл, к элементарной табличной форме:
∫(2e)sds = ∫asds = as / lna + C = (2e)s / ln(2e) + C = 2ses / ln(2 + lne) + C = 2ses / (ln2 + 1) + C.
Подведение под знак дифференциала
По большому счету, данный метод неопределенных интегралов - брат-близнец принципа замены переменной, однако имеются различия в процессе оформления. Рассмотрим детальнее.
Если ∫v(x)dx = V(x) + C и y = z(x), то ∫v(y)dy = V(y) + C.
При этом нельзя забывать тривиальных интегральных преобразований, среди которых:
- dx = d(x + a), где а - любая константа;
- dx = (1 / a)d(ax + b), где а - опять же константа, но при этом не равна нулю;
- xdx = 1/2d(x2 + b);
- sinxdx = -d(cosx);
- cosxdx = d(sinx).
Если рассматривать общий случай, когда вычисляем неопределенный интеграл, примеры можно подвести под общую формулу w'(x)dx = dw(x).
Примеры:
- необходимо найти ∫(2s + 3)2ds, ds = 1/2d(2s + 3)
∫(2s + 3)2ds = 1/2∫(2s + 3)2d(2s + 3)=(1/2) х ((2s + 3)2) / 3 + C = (1/6) х (2s + 3)2 + C;
∫tgsds = ∫sins/cossds = ∫d(coss)/coss = -ln|coss| + C.
Онлайн-помощь
В некоторых случаях, виной которым может стать или лень, или острая необходимость, можно воспользоваться онлайн-подсказками, а точнее, применить калькулятор неопределенных интегралов. Несмотря на всю видимую сложность и спорность интегралов, решение их подчинено определенному алгоритму, который строится по принципу "если не ..., то ...".
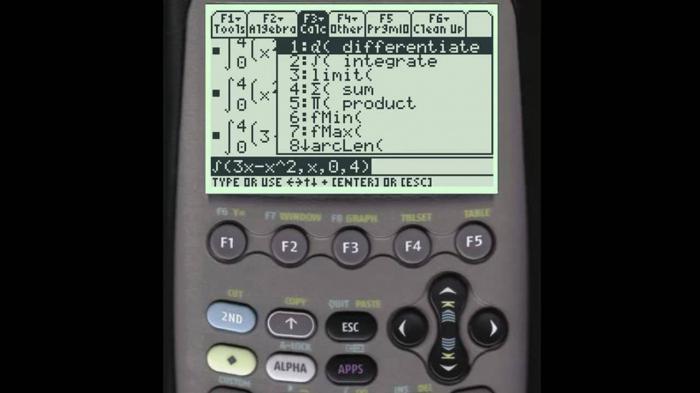
Конечно, особо затейливые примеры такой калькулятор не осилит, так как бывают случаи, при которых решение приходится находить искусственно, "насильственно" вводя те или иные элементы в процессе, ибо очевидными путями результата не достичь. Несмотря на всю спорность данного заявления, оно верно, так как математика, в принципе, наука абстрактная, и своей первостепеннейшей задачей считает необходимость расширения границ возможностей. Действительно, по гладким обкатанным теориям крайне сложно двигаться вверх и развиваться, поэтому не стоит считать, что примеры решения неопределенных интегралов, которые дали мы - это верх возможностей. Однако вернемся к технической стороне дела. Хотя бы для проверки вычислений можно воспользоваться сервисами, в которых все было прописано до нас. Если возникла нужда в автоматическом вычислении сложного выражения, то ими не обойтись, придется прибегнуть к более серьезному программному обеспечению. Стоит обратить внимание в первую очередь на среду MatLab.
Применение
Решение неопределенных интегралов на первый взгляд кажется совершенно оторванным от реальности, так как сложно увидеть очевидные плоскости применения. Действительно, напрямую их использовать нигде нельзя, однако они считаются необходимым промежуточным элементом в процессе вывода решений, используемых на практике. Так, интегрирование обратно дифференцированию, благодаря чему активно участвует в процессе решения уравнений.
В свою очередь эти уравнения оказывают непосредственное влияние на решение механических проблем, вычисление траекторий и теплопроводности - словом, на все, что составляет настоящее и формирует будущее. Неопределенный интеграл, примеры которого мы рассмотрели выше, тривиален лишь на первый взгляд, так как является базой для совершения все новых и новых открытий.